
Стосовно традиції починати із переліку невдалих запусків. Як не смішно, перша ж спроба виявилася вдалою. В це навіть самі автори не особливо вірили (офіційна оцінка ймовірності успіху -- 60%). "Surveyor-I, the spacecraft described here, was the first engineering test model to be flown" [Surveyor-I - A preliminary report - June 1 - 1966]. (Нагадую, "Луна-9" була 12-тим запуском в рамках програми м'якої посадки.)
Конструкція та політ
- Запущено 30 травня 1960, 14:41:00 UTC.
- 31 травня, о 06:45 UTC -- корекція курсу.
- Посадка 2 липня 1966, 6:17:36 UTC, через 63 години, 30 хвилин.
- Координати посадки (по сучасним даним), 2.474 S, 43.339 W.
- Маса під час запуску: 995.2 кг, маса після посадки: 294.3 кг.
Дещо еклектичну конструкцію ("оця фігня з трубочок та коробочок -- космічний апарат?!") можна уявити за допомогою наступних ілюстрацій:
 |
| Схема Surveyor-I, у конфігурації перед посадкою. На жаль, якість зображення доволі низька, а мені бракує часу та вмінь привести її до пристойного вигляду. Може в кого є бажання? :-) A -- всенаправлена антена A, B -- каркас, C -- сонячна батарея (рухома), D -- направлена антена (плоска антенна решітка, рухома), E -- щогла, F -- TV-камера, G -- сенсори керування польотом (flight control sensors), H -- амортизатори (shock absorber, три штуки), I -- всенаправлена антена B, J -- посадочна нога №3, K -- допоміжна буферна батарея (auxiliary storage battery), L -- основний гальмівний двигун, M -- антена радіовисотоміра, (radar altimeter), змонтована на соплі, N -- двигун орієнтації на холодному газі (три штуки), O -- посадочна нога №2, P -- зминний блок для амортизації посадки (crushable block, три шутки), Q -- верньє́рний двигун (три штуки), R -- антена доплерівського вимірювача швидкості та радіовисотоміра, S -- посадочна нога №1, T -- блок електроніки із терморегуляцією (два). (c) Surveyor I mission report. Part II - Scientific data and results - Sep 1966 |
 |
| Якось так він би виглядав зі сторони. Фото моделі на модельній поверхні Місяця. (c) Взято тут. |
 |
| Ще одна схема, на прикладі Surveyor-5. 1 -- посадочна нога, 2 -- зминний блок з алюмінієвих комірок, для поглинання енергії удару, 3 -- антена альтиметра/вимірювача швидкості, 4 -- верньєрний двигун, 5 -- головка альфа-аналізатора для визначення хімічного складу місячного ґрунту, прилад відсутній у Surveyor-1/-4!, 6 -- ненаправлена антена на виносній штанзі, 7 -- TV-камера, 8 -- направлена плоска антена, 9 -- пристрій наведення антени і сонячної батареї, 10 -- датчик Сонця, 11 -- сонячна батарея, 12 -- кріплення посадочних ніг у складеному положенні (три штуки). Див. також ще одну схему, "Spacecraft Surveyor-mid course configuration". (c) NASA, Surveyor V mission report. |
{kind=link}
{kind=link}
 |
| Коли вже завершував пост, натрапив на якимось чудом пропущену раніше схему. Вона виявилася чи не кращою від всіх трьох попередніх зображень, разом взятих. Але переробляти пост, перекладати підписи і т.д. мені було лінь. Тому просто кидаю її, як було, в доповнення до попередніх. (c) Surveyor I mission report. Part II - Scientific data and results - Sep 1966 |
Основою апарата служила ажурна тринога із тонкостінних алюмінієвих трубок із трикутним перерізом, з'єднаних скобами. До цього каркасу кріпилося все обладнання (див. підписи до рисунків вище). На його вершині знаходилася щогла із сонячною батареєю та плоскою, направленою, антеною. Ця антена могла повертатися, разом із сонячною батареєю, для забезпечення наведення на Землю та на Сонце. До нижньої частини кріпилися три відкидні ноги (які під час запуску були складеними, щоб поміститися в ракету). Ноги мали амортизатори, які складалися із алюмінієвих комірок, що, зминаючись під час удару, поглинали його енергію. Аналогічно могли руйнуватися, вберігаючи решту апарату від надмірних стресів, нижні частини опор ніг.
 |
| Конструкція посадочних ніг-опор та послідовність рухів під час посадки. Їх діаметр -- 20 см. Leg -- ноги, Strain gage -- датчик деформації, Attitude control jet -- двигун орієнтації, photometric target -- калібрувальна "ціль" для камери, Shock absorber -- амортизатор, aluminium honeycomb block -- алюмінієві комірки, для поглинання енергії удару (див. рис (b)). (c) Surveyor I - A Preliminary Report - June 1, 1966 |
Повна висота апарату -- 3.05 метра, діаметр кола, проведеного через всі три ноги -- 4.27 м. Сконструйовано його так, що він міг успішно перенести посадку на схили до 15 градусів, із вертикальною швидкістю до 6 м/с, горизонтальною до 2.2 м/с.
Сонячна батарея мала площу 0.855 \(м^2\), складалася з 792 комірок і могла генерувати до 85 ват (ККД 8.2%), із напругою на виході 17-22.5В. Вага її, разом із механізмом повороту -- 4.8 кг. Енергія могла зберігатися у срібло-цинковій акумуляторній батареї. Її ємність -- 3800 ампер-годин, (за струму розрядки 1А); напруга 22В; припустимий температурний діапазон - 4-60С. Також використовувалася допоміжна батарея, 800-1000 ампер-годин, яка не могла підзаряджатися від сонячних батарей. Система контролю живлення перерозподіляла та конвертувала енергію у потрібну форму, в залежності від поточних потреб. На її вхід поступала напруга від сонячних батарей та обох акумуляторів, а на виході підтримувалася напруга 29В. Вона ж керувала зарядкою головної батареї. Крім того, існувала некерована лінія, із напругою 22 В, від якої живилася або апаратура, не дуже вимоглива до напруги, або із власним регулятором (нагрівачі, силові приводи і т.д).
Зв'язок із Землею здійснювався за допомогою направленої антени (необхідна для передачі якісних зображень), двох ненаправлених антен на спеціальних штангах для передачі команд і даних, двох передавачів та двох приймачів. Частота передавачів -- 2295МГц, потужність -- 10Вт (до відділення від ракети працювали на потужності 0.1Вт). Якоїсь особливої автономії, не говорячи про комп'ютери, апарат не мав, більшість команд, навіть дрібних, передавалися із Землі -- за перші два місячних дні було передано більше 100 000 команд, всього за час роботи -- 158 084. Важливий виняток -- автопілот, що керував апаратом під час корекції траєкторії та посадки (див. далі). Блок декодування команд міг опрацьовувати 256 бінарних команд, крім того міг сприймати команди керування часовими інтервалами роботи механізмів. Команди перевірялися блоком, і якщо її структура була невірною, відкидалася і передавалася назад, (для відлагодження :). Якщо команда приймалася до виконання, про це теж повідомлялося.
Телеметрія включала порядку 200 різноманітних параметрів і могла передаватися із швидкістю 17.2/137.5/500/1100 біт в секунду (4400 біт/с, якщо працювати через направлену антену).
Телеметрія включала порядку 200 різноманітних параметрів і могла передаватися із швидкістю 17.2/137.5/500/1100 біт в секунду (4400 біт/с, якщо працювати через направлену антену).
Дві коробки із терморегуляцією використовувалися для приладів, перша (контейнер A) підтримувалася за температури 5-50С, (вага системи терморегуляції -- 11.3 кг), містила пристрої зв'язку та живлення, друга (контейнер B): -20-50С, і містила системи керування та перетворення сигналів (вага системи терморегуляції 8.2 кг). Для терморегуляції використовувалася як пасивні методи: покриття певних елементів білою фарбою, полірування алюмінієвих поверхонь, використання дзеркал (див. фото ближче до низу) та матеріалів із високою випромінювальною здатністю в інфрачервоному діапазоні, термоізоляції; так і активні: невеликі електричні нагрівачі, (в сумі потужність 3Вт), підключення поличок з апаратурою до радіаторів, якщо температура зростала вище певної межі, тощо.
Ніяких наукових приладів, окрім власне камери, (точніше пари камер, одна з яких не використовувалася), Surveyor-1 не мав, але містив більше сотні різноманітних інженерних датчиків -- термометри, датчики деформації (із зусиллям до 800 кг), акселерометри, датчики взаємного розташування окремих частин апарату. Вага цього допоміжного обладнання складала 28.5 кг.
TV-Камера
В певному сенсі, принаймні для нас, "atm-chair space researchers", найважливішою частиною станції була камера. Камеру було змонтовано на основі апарату, трішки в стороні від центру і під кутом 16 градусів до вертикалі (див. зображення вище). Базувалася вона на відиконі. Для наведення використовувалося дзеркало. Воно ж дозволяло робити стерео-пари, з допомогою яких можна було проводити виміри відстаней до об'єктів на поверхні. Всі операції здійснювалися по команді з Землі. Камера мала барабан із чотирьох фільтрів, (прозорий, блакитний, зелений та оранжевий), які змінювалися по команді з Землі. Їх спектральні відгуки яких представлені у Surveyor I mission report. Part II - Scientific data and results - Sep 1966, на стор. 9-10. |
| Конструкція камери Surveyor-ів. (c) Surveyor I mission report. Part II - Scientific data and results - Sep 1966, переклад мій. |
Фокусна віддаль могла змінюватися неперервно від 25 мм до 100 мм, хоча в, основному, використовувалися крайні значення. Поле зору із 25 мм складало \(25.3^o\), для 100 мм -- \(6.4^o\). Крок повороту дзеркала: 3°±0°.1 по горизонталі, 2°.48'±0°.1 по вертикалі. Різкість можна було наводити на віддаль від 1.2 м до безмежності. Для керування динамічним діапазоном, чутливістю (на безатмосферному Місяці, протягом місячного дня, з діапазоном освітленостей просто біда :-), використовувалася діафрагма-зрачок (iris). Стандартна витримка -- 150 мс, але по команді могла бути встановлена практично будь-яка. Динамічний діапазон відикона був 25 до 1, комбінацією різних засобів збільшувався до 3000 до 1, з використанням витримки 1.2 с -- 25 000 до 1, і ще раз в 40 більше, якщо "інтегрувати", залишивши затвор відкритим, наприклад, для фотографування нічного неба. В такому режимі камера могла побачити на небі зірки шостої зоряної величини. Це якраз найслабші зорі, які людина з нормальним зором, може побачити ясної, безхмарної, ночі. Спеціальний світлочутливий механізм блокував відкриття затвору, якщо освітленість була завеликою (наприклад, камера дивилася на Сонце). Правда, його можна було вимкнути по команді з Землі.
Сканування могло здійснюватися в режимі 200 ліній на кадр та 600 ліній на кадр. В першому режимі кадр сканувався кожних 61.8 с (60.8 с?), час на передачу -- 20с, необхідна смуга пропускання для передачі - 1.2кГц, зображення могли передаватися через ненаправлену антену. В другому: сканування кожних 3.6 с, 0.2 с -- експозиція, в той же час передається інформація про орієнтацію дзеркала та температуру, 1 с -- зчитування, 2.4 с -- підготовка відикона до наступного кадру, смуга частот -- 220 кГц, швидкість, приблизно, 4400 біт на секунду, тому могло відбуватися лише через направлену антену -- пам'яті на борту не було. В першому режимі було передано всього 23 кадри (більша частина зразу після посадки, ще до орієнтації антени на Землю), в другому -- більше 11 000, (детальніше - нижче).
Кутова роздільна здатність камери була приблизно вдвічі меншою, ніж у людського ока -- камера могла роздивитися вдвічі менші деталі. Зокрема, на рівні посадочної ноги (віддаль 1.6 м) роздільна здатність складала 0.5 мм. Курйоз: згаданий вище звіт стверджує, що Ranger-и покращили роздільну здатність найкращих тоді телескопічних спостережень на три порядки, а Surveyor, у свою чергу, покращив їх ще на три. Згідно того ж звіту, повторні калібрування, в процесі роботи показали, що параметри камери залишалися досить стабільними.
Важливе зауваження. 11 тисяч переданих фото звучить дуже грізно, особливо в порівнянні із трьома-чотирма панорамами "Луна-9". Однак розрив, хоч і гігантський, не був аж таким. Одне фото Surveyor -- грубо 600x600 пікселів. Повна панорама охоплювала 360 градусів по горизонталі і кут від +40 до -65 градусів відносно площини камери (яка, нагадаємо, нахилена 16 градусів до вертикалі, вниз), всього -- 105 градусів. За максимальної роздільної здатності охоплена одним зображенням область -- \(6.4^o\), тому маємо приблизно 56x16 кадрів на панораму, із роздільною здатністю кожного -- 600x600. (Звичайно, це лише оцінка, слід враховувати роздільну здатність конкретних зображень, їх перекриття і т.д.) Відповідно, роздільна здатність панорами могла бути аж до 33750x9840 пікселів. Це багато більше ніж те, що могла "Луна-9", 6000x500. За кількістю пікселів -- приблизно в 120 раз. Але аж ніяк не в тисячі раз більше. Правда, "американець" ще й в кольорі передавати міг, завдяки світлофільтрам...
Зауваження: на одній з ніг знаходилася ще одна камера, для фотографування контексту (згадаємо MARDI на MSL Curiosity). Її не використовували, вирішивши, що інженерні дані є більш важливими, а канал був занадто вузьким, щоб вмістити і їх і зображення.
Системи керування польотом, процедура посадки
Для визначення своєї орієнтації в просторі апарат використовував датчик Сонця, датчик Канопуса (саме цю зірку часто використовують для космічної навігації, бо вона яскрава і знаходиться далеко від площини екліптики), та три перпендикулярних гіроскопи. Деталі процедури орієнтування на Сонце мені не траплялися, (хоча, думаю, знайти їх можна), крім того, що основний датчик мав 5 фотоелементів (CdS), і існував ще допоміжний. Орієнтація на Канопус могла відбуватися двома способами. Апарат міг обертатися з кутовою швидкістю 0.5 градусів за секунду, натрапивши на зірку, на Землю передавалася інформація про її яскравість і відбувалася звірка з еталоном. Іншим підходом була реєстрація всіх доступних датчику зірок під час повороту на 360 градусів і порівняння отриманої карти із еталонною.| Схема польоту. Деталі -- в тексті. (c) Surveyor I - A Preliminary Report - June 1, 1966. |
Для керування положенням служили дві системи. У вільному польоті використовувалися невеликі двигуни на холодному, стисненому, газі (азоті, запас -- 2 кг), розташовані на кінцях ніг. Тяга кожного двигуна -- 0.14Н. Під час активних фаз польоту (корекція, гальмування), використовувалися три верньєрні двигуни, зусилля яких було керованим (throttlable) у діапазоні від 133 Н до 462 Н. Для керування обертанням (roll control), один із них міг повертатися. В ролі палива вони використовували монометилгідразин, з окисником MON-10 (90% \(N_2O_2\), 10% NO). (Нещодавно померла пані, яка розробила систему керування, що дозволила пізніше відмовитися від такої хитрої, складної, а значить -- важкої і ненадійної, комбінації різних систем керування.)
Так як після запуску апарат промахувався на чотири сотні кілометрів, 31 березня, о 06:45 UTC, на віддалі 156 000 км від Землі, було здійснено корекцію. Верньєрні двигуни пропрацювали 20.75 секунди (потрібне значення було 20.65 с -- можна оцінити точність виконання), змінивши швидкість на 20.3 м/с.
Для основної частини гальмування перед посадкою використовувався твердопаливний двигун (у сталевому сферичному корпусі), який міг розвивати зусилля від 35000 Н до 44 500Н.
 |
| Гальмування і посадка. Деталі в тексті. (c) Surveyor I - A Preliminary Report - June 1, 1966. |
Гальмування відбувалося так.
- За 34 хвилини до запланованого часу ввімкнення гальмівного двигуна апарат було зорієнтовано так, щоб його головна вісь була паралельна вектору швидкості. Завершився цей маневр через 5 хвилин, 29 хв. до запуску двигуна.
- На висоті 75.3 км, коли швидкість апарата відносно Місяця була 2612 м/с, по сигналу з радіовисотоміра (radar altimeter), запустився гальмівний двигун. При тому, радар відстрілювався. (Це економило трішки палива -- він свою функцію виконав, немає потреби і його масу гальмувати).
- Через ~40 секунд він вимкнувся та був відстрілений. Відбулося це на висоті приблизно 11 км, швидкість складала 131.7 м/с (очікувана -- 119±33 м/с, цілком хороший результат).
- Далі спуск відбувався під контролем верньєрних двигунів. Керування апаратом, зокрема, його орієнтацією на етапі гальмування, здійснювалося аналоговим автопілотом. Він використовував дані від доплерівського вимірювача швидкості та радіовисотоміра, акселерометра, гіроскопів і передавав команди на верньєрні двигуни. Під час роботи головного гальмівного двигуна точність орієнтації складала 0.3 градуса (максимальне допустиме відхилення - 1 градус).
- На висоті 3.4 м двигуни вимкнулися, останні метри апарат падав вільно. Швидкість падіння в момент контакту була 3.3 м/с (із 6 дозволених), горизонтальна швидкість була близька до нуля.
- В момент контакту зусилля на ноги було 610, 730 і 520 кг. Після удару апарат підстрибнув на 6 см.
- Під час посадки нарешті розгорнулася одна із ненаправлених антен, яка не змогла успішно розкритися після запуску. Надалі нею теж користувалися для зв'язку.
Під час польоту на апарат було передано порядку 300 команд.
Первинні задачі:
Результати
Задачі
Перш ніж перейти до опису того, чим займався апарат на поверхні, хочу звернути увагу на задачі, що стояли перед ним.Первинні задачі:
- Розробка і випробування технології м'якої посадки на Місяць.
- Демонстрація адекватності системи зв'язку.
- Демонстрація здатності ракети Atlas-Centaur запустити Surveyor на потрібну траєкторію.
- Отримати інженерні дані від всіх підсистем під час перельоту, корекції курсу, посадки та під час роботи на поверхні.
- Після посадки отримати зображення ноги апарата та ґрунту навколо.
- Отримати зображення місячної топографії.
- Отримати дані про коефіцієнт відбивання променя радара поверхнею.
- Отримати дані щодо міцності поверхні.
- Отримати дані про температуру апарата під час перебування на Місяці.
На вищому рівні абстракції, основні задачі були схожі на задачі для "Луна-9" -- перевірити, чи не провалиться, чи справді є можливість висадитися людям.
Робота на поверхні
Першу годину, після посадки, апарат передавав інженерну інформацію. Потім, ще на низькій роздільній здатності, 200 ліній, зробив 14 фотографій. На момент початку висота Сонця над горизонтом була 28 градусів. Я так розумію, це було зроблено, щоб мати хоч якісь зображення, якщо апарат швидко відмовить. Аналогічно, перед запуском камера була сконфігурована так, щоб вона дивилася на посадочну ногу, встановлено прозорий фільтр і мінімальну фокусну віддаль -- щоб у випадку відмови частини (а то й всієї) механіки, можна було отримати зображення ґрунту та посадочної ноги зблизька і з певним контекстом. Це дало б можливість принаймні оцінити структуру та міцність ґрунту.
Через 3 год 15 хв направлену антену було орієнтовано на Землю і розпочато передачу зображень у високій роздільній здатності, 600 ліній.
Отримані першого дня, (ніч 1 червня, ранок 2 червня), 144 зображення транслювалися практично вживу комерційними телеканалами у США, та, через супутник зв'язку, Європи. З 2 по 8 червня, 9-10 годин в день, поки станція в Голдстоуні могла приймати сигнал з Surveyor, передавалися зображення, решту часу лише телеметрію, яку приймали інші станції (в Крюгерсдорпі и Тідбінбіллі). Сеанс зв'язку виглядав так: 45 хвилин передаються зображення, на 20-30 хвилин апаратура вимикалася, щоб уникнути перегріву, потім передавалася телеметрія, далі цикл повторювався.
4 червня проведено експеримент -- 7 раз вмикався двигун орієнтації на нозі №2. Кожне ввімкнення тривало секунду, двигун працював у імпульсному режимі, 20 мс ввімкнено, 30 мс пауза. Сумарний час роботи -- 4.5 с. Розвивалася тяга приблизно 0,14 Н. Його віддаль до поверхні була порядку 20 см, кут від вертикалі -- 72°. Ціль експерименту -- перевірити, як зміниться поверхня, чи буде здута пилюка, і т.д. Порівняння фотографій до і після ввімкнення не виявило відмінностей.
До 5 червня отримано 2503 фото, сфотографовано Сіріус. (Пізніше було сфотографовано Юпітер і Канопус, Землю сфотографувати не вдалося.) 8 і 9 числа фотографування не було -- з одного боку, на Місяці якраз був полудень, висока температура заважала роботі апаратури, з іншого, наземний персонал втомився і потребував відпочинку. 12-го відмовив потенціометр, який керував вертикальним положенням дзеркала (див. схему камери вище). Замість "гарантійних" 25 годин пропрацював 100. 14 червня, о 15:39, термінатор (межа дня і ночі -- на безатмосферному Місяці вона дуже чітка) перетнув місце знаходження станції. На фото під час, і після заходу Сонця, у відбитому Землею світлі -- вона там багато яскравіша, ніж багато менший і дуже тьмяний Місяць у нас, отримано зображення поверхні, (тінь апарата була довжиною до 30 м), сфотографовано зірки та сонячну корону. Фотографування припинилося 14-го, о 16:18 -- вночі немає ні освітлення, ні енергії. За перший місячний день передано 10 338 (10 150 згідно іншого джерела) зображень. 16 червня, о 20:30, було отримано останні виміри температури (сонячна батарея: -173С, контейнер A: +1.7С, контейнер B: -17.8C, головна батарея: +1.1С). Після цього все, крім двох приймачів, було вимкнено.
Перед припиненням зв'язку сонячну батарею орієнтували так, щоб Сонце освітило її аж близько полудня, 6 липня, через сім днів після сходу (29 червня). Це було зроблено для того, щоб перш ніж почнеться зарядка батареї, вона, та відповідна електроніка, прогрілися до -23С. Спершу планувалося до того моменту на зв'язок не виходити -- щоб запобігти поломкам. Однак, потім вирішили, що важливіше отримати виміри температури на початку сонячного дня. Спроби вийти на зв'язок почалися зразу після сходу Сонця, 29 червня, але були безуспішними до 6 липня (12:29). На момент встановлення зв'язку в контейнері А була температура -6.6С, в контейнері В: +15.5С, всі системи працювали нормально, але ефективність сонячних батарей впала на 12%. 7-го зроблено 38 фото. 9-го виникла загроза перегріву батареї (54 градуси, за максимально дозволеної 60). Проведено експеримент по ввімкненню верньєрних двигунів, ніяких змін поверхні не виявлено. Всього за другий місячний день (до 13 липня) отримано 812 зображень. 14-го, перед заходом Сонця, зроблено спробу отримати фото сонячної корони, але, при передачі 9-го фото, апарат вимкнувся. Ймовірно -- кінчилася енергія в батареї.
Всього перших два місячних дні апарат пропрацював 612 годин, передав 11 150 фото, з яких 23 (14 першого дня на поверхні і 9 зображень корони, переданих 14-го липня). Цікава цитата однієї із робіт, йому присвячених: "На одном из последних снимков видны разбитые пластинки зеркального стекла, которым облицованы контейнеры". З того приводу див. фото внизу.
Потім, до 8 жовтня, ніяких робіт з апаратом не проводилося. На спробу зв'язку 8 жовтня він відповів успішно, вся апаратура поводилася нормально, за винятком головної батареї, яка більше не заряджалася -- живлення поступало з допоміжної. Зображення отримати не вдалося, через високий рівень шумів, взагалі, сигнал був дуже слабким. З 8 до 12 жовтня (кінець місячного дня) було проведено 5 повних і кілька неповних сеансів зв'язку. В листопаді зв'язок встановили ще раз, і 9-го січня наступного, 1967, року -- востаннє. Камеру ввімкнути не вдалося.
Нарешті, фото
Знайти фото, зроблені Surveyor-1, окрім чогось дуже популярної тіні: |
| Тінь Surveyor-1, (c) NASA/JPL |
 |
| Ґрунт біля ноги №2. Роздільна здатність -- 0.5 мм на піксель. Праворуч, вище середини, видно калібрувальну "ціль". (c) NASA/JPL |
виявилося нетривіально. Справа в тому, що зображення, які приходили з Місяця, виводилися на спеціальний "повільний" телевізор, інертність якого була підібрана так, щоб співпадати із швидкістю прибуття зображень, паралельно цей телевізійний сигнал зберігався на магнітну плівку відеомагнітофона. Можливо, в цілях резервного копіювання екран також фотографувався. Наскільки розумію, плівки до нашого часу не дійши, а якщо вони й все ще існують, нетривіально знайти прилад, здатний їх прочитати. (Цікава суміжна історія -- див. проект LOIRP, Lunar Orbiter Image Recovery Project, присвячений відновленню даних, отриманих Lunar Orbiter). Тобто, зараз доступні лише роздруківки оригінальних фото із архівів JPL. На щастя, Phil Stooke отримав до них доступ, відсканував, та користуючись сучасними засобами обробки зображень, зробив для нас панораму:
 |
| Панорама зображень Surveyor-1. КЛІКАБЕЛНО! Перекласти я полінувався, але footpad -- власне посадочна нога, crater -- кратер, subdued crater -- присипаний кратер, ліворуч -- північ (north). (c) Phil Stooke, "The International Atlas of Lunar Exploration", pg. 90-91. |
Правда, потім довго матюкався, зокрема і на "Unmanned Spaceflight.com", що хоче більше ніколи не мати справи із зображенням з "Сервейорів" -- робота виявилася довгою та нудною.
За його ж реконструкцією, географія місця посадки:
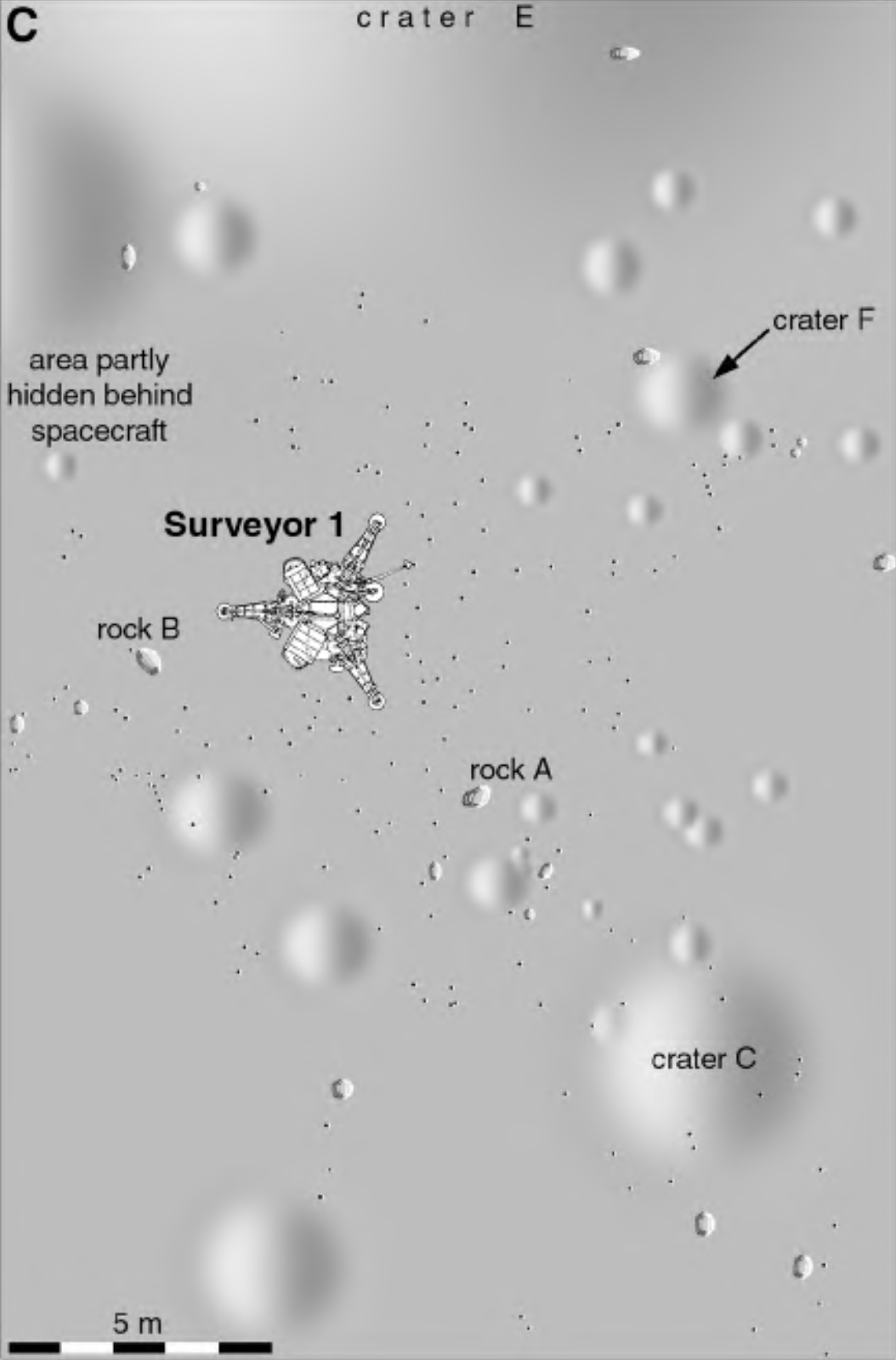 |
| Реконструкція місця посадки. (c) Phil Stooke, "The International Atlas of Lunar Exploration", pg. 89. |
 |
| Карта місця посадки, попереднє зображення вміщається в білому прямокутнику. (c) Phil Stooke, "The International Atlas of Lunar Exploration", pg. 88. |
 |
| Фрагмент панорами. Взято тут. Там ж є аудіозаписи з запуску, посадки та отримання першого фото. Знайдіть зображене місце на панорамі вище. Якщо знайдете, наочно побачите, що хоча "11 тисяч фото" звучить круто, фото бувають різні (за розміром, наприклад :). |
 |
| Приблизно так відображалися фото в той час. (c) NASA/JPL, взято тут, там ще багато! |
 |
| А так ця ж гряда виглядає після обробки професіоналом із використанням сучасних засобів. Каюся, приклад не дуже вдалий -- деякі інші ділянки, в сучасній обробці, стали кращими значно виразніше. (c) Phil Stooke, "The International Atlas of Lunar Exploration", pg. 91. |
 |
| Сонячна корона, 16 хвилин, після заходу Сонця, 14 червня 1996. Із Сонця, наче олівець, стирчить коронарний промінь. Взято тут. |
 |
| Зірки (ліворуч карта, праворуч -- фото з Surveyor-1). Видно, що тій техніці фотографування неба давалося нелегко... (c) Surveyor I mission report. Part II - Scientific data and results - Sep 1966. |
 |
| Каменюка. Довжина трішки більше за 0.5 м, розташована на південному заході, 5 м від камери. (c) JPL/NASA |
 |
| Розтріскування дзеркальної поверхні контейнера A, про яку говорилося вище. 12 липня 1966. Ймовірна причина -- теплові коливання. (На більш ранніх фото дана плитка була цілою.) (c) Surveyor I mission report. Part II - Scientific data and results - Sep 1966. |
Щодо невізуальної інформації, приклад даних телеметрії:
 |
| Зусилля на амортизаторах ніг під час посадки. (Максимальне значення для ноги 3 не вказане, через неточності в калібруванні). (c) Surveyor I mission report. Part II - Scientific data and results - Sep 1966. |
Підсумок
Апарат свої задачі виконав повністю. Навіть перевиконав. Проведено всі інженерні випробування. Отримано уявлення про вигляд, геологію, розподіл розміру фрагментів та кількість кратерів на поверхні. Безпосередньо вивчено міцність ґрунту. Підтверджено, що сідати можна, і що архітектура "Аполлонів" адекватна для поставленої задачі.
Детальніше див. Surveyor I - A Preliminary Report - June 1, 1966 та Surveyor I mission report. Part II - Scientific data and results - Sep 1966. (А для оцінки значимості відомостей, переданих апаратом, бажано ознайомитися з сучасною планетологією. :-)
Детальніше див. Surveyor I - A Preliminary Report - June 1, 1966 та Surveyor I mission report. Part II - Scientific data and results - Sep 1966. (А для оцінки значимості відомостей, переданих апаратом, бажано ознайомитися з сучасною планетологією. :-)
Життя після смерті
Хоча на початку 1967-го для апарата вже все закінчилося, так просто його не забули. Вперше його побачив Lunar Orbiter-1, правда якість була недостатньою, щоб хоч наскільки впевнено ідентифікувати. Lunar Orbiter-3 роздивився краще:
 |
| Surveyor-1 на фото з Lunar Orbiter-3. Пляма в центрі -- апарат, ліворуч вниз протягнулася тінь, довжиною порядку 10 метрів. (c) NASA/JPL/LOIRP (за посиланням також контекстні фото). |
Однак, зображення все ще не дуже... Якби не довга, (при тому -- очікуваної довжини), тінь, розпізнати б не вдалося. Нарешті, в 2009, Lunar Reconnaissance Orbiter, своєю набагато більш окатою камерою, сфотографував так:
 |
| Surveyor-1 на фото Lunar Reconnaissance Orbiter, 2009. Порівняйте із картою від Філа Стука, наведеною вище! (c) NASA/JPL |
 |
| Те ж фото, "здалеку". (c) NASA/JPL |
На разі, із Surveyor-1 -- все. На прощання традиційні відео.
Тогочасна популярна розповідь про місію. Гарна! Але англійською.
Детальний аналіз посадки, із моделями, конструкцією, формулами і т.д. Для гурманів:
Тогочасна популярна розповідь про місію. Гарна! Але англійською.
Детальний аналіз посадки, із моделями, конструкцією, формулами і т.д. Для гурманів:
Навпаки, для зовсім лінивих, короткий зміст тексту вище, всього лиш за 41 секунду:
і,
Дякую за увагу!
Література
- Surveyor I - A Preliminary Report - June 1, 1966. У NASA там зараз проблеми, зокрема фінансові, але не тільки. За посиланнями висить повідомлення: "The NASA technical reports server will be unavailable for public access while the agency conducts a review of the site's content to ensure that it does not contain technical information that is subject to U.S. export control laws and regulations and that the appropriate reviews were performed. The site will return to service when the review is complete. We apologize for any inconvenience this may cause." Тому для частини цих звітів даю додаткове посилання.
- Відповідна глава з книги А. В. Баевский "Космические автоматические аппараты США для изучения Луны и окололунного пространства (1958-1968 гг.)", МОСКВА 1971. Надзвичайно детальне джерело. Більшість подробиць бралися саме звідти, хоча і звірялися з іншими джерелами.
- Трохи лаконічніший російськомовний огляд.
- Surveyor I mission report. Part II - Scientific data and results - Sep 1966. Додаткове посилання.
- Surveyor I mission report. Part III - Television data (February 15, 1967).
- Surveyor I Mission Report. Part I - Mission Description and Performance.
- Surveyor Program Results, 1969. Додаткове посилання.
- A treatise on the Surveyor lunar landing dynamics and an evaluation of pertinent telemetry data returned by Surveyor I (August 15, 1967).
- "EXPLORING SPACE WITH A CAMERA (SP-168)" -- поміж інших, містить багато фото із Surveyor-1. Ймовірно, всі вони взяті з оглядів, згаданих вище, але якість краща, Ніж у сканах на сайті NASA.
- "First Photos on the Moon" -- ще фото. (Назва трохи лукавить.)
- Запис в NSSDC Master Catalog, NSSDC ID: 1966-045A, та опис камери і датчика деформації.
- Вікіпедія: "Surveyor-1", "Surveyor program".
- "The International Atlas of Lunar Exploration", Philip Stooke, pg. 82-84. Сайт автора.
- Сторінка Surveyor-ів на сайті Boing. "Surveyor 1, the first in a series of seven soft-landing lunar spacecraft designed and built by Hughes Aircraft Company, later as Hughes Space and Communications Company, and now Boeing Satellite Systems, Inc.".
- Обговорення на unmannedspaceflight, "Phil Stooke's lunar panoramas at TPS", (зокрема тут Phil Stooke стверджує: "Kenny - and anybody else - you are free to use my pans in any presentation or publication. I regard them as being in the public domain, as were the originals. Just give me a credit.") "Ranger, Surveyor, Luna, Luna Orbiter, 1960s Missions to Earth's Moon", "Lunar Spacecraft Images, A place for moon panoramas, mosaics etc.".
- "Unmanned Space Project Management: Surveyor and Lunar Orbiter" (SP-4901).
- "Surveyor 1 - America’s first soft lunar landing" і "Another lunar lander photographed: Surveyor 1!" -- трішки про орбітальні фото.
i see you are a space lover like me.really enjoyed reading this i am also a fellow blogger i love writing about space and tech if u are interested checkout Astronomers found 20 new moons orbiting Saturn
ВідповістиВидалитиAI SECURITY and its application